Pendulum
Period of a pendulum can be measured by using a light sensor. A laser
beam falling on a photo transistor is interrupted periodically by the
pendulum. The photo transistor output is fed to one of the digital
inputs and the time period is measured by the computer.
1. Simple pendulum
The measured values of period 'T' for a pendulum of
29.9 cm length is shown below. Value of 'g' is calculated using the
simple pendulum equation. Photograph
of the setup.
Period 'g'
1.095241 984.0
1.095222 984.1
1.095241 984.0
1.095229 984.1
1.095230 984.1
1.095223 984.1
1.095191 984.1
1.095165 984.2
1.095196 984.1
1.095205 984.1
1.095179 984.2
1.095178 984.2
2. Compound pendulum
The values
below are for a pendulum made by attaching an iron ball of 1.27
cm radius on one one end of a brass rod of 17.88 cm length and 1.4 mm
radius. Photograph
T (usec) g
0.868908 1001.3
0.868884 1001.4
0.868898 1001.4
0.868877 1001.4
0.868889 1001.4
0.868869 1001.4
0.868886 1001.4
0.868869 1001.4
0.868861 1001.5
0.868867 1001.4
The value of g is wrong because it is calculated
using simple pendulum formula. It can be seen that the period 'T' is
measured with an error less than 100 microseconds.
3. Rod Pendulum
The values below are for a 'rod pendulum'
of lenght 14.4 cm. The
amplitude was decreasing very fast. The calculated value of 'g' changes
because of the error due to the assumption sin(theta) = theta changes
with amplitude.
0.620988 982.8
0.620955 982.9
0.620907 983.1
0.620854 983.2
0.620805 983.4
0.620767 983.5
0.620714 983.7
0.620660 983.8
0.620614 984.0
0.620568 984.1
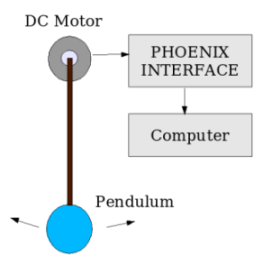
Nature of oscillations
Simple pendulum can be studied in several different ways
depending on the sensor you have got. If you have an angle sensor the
displacement of the pendulum can be plotted as a function of time.
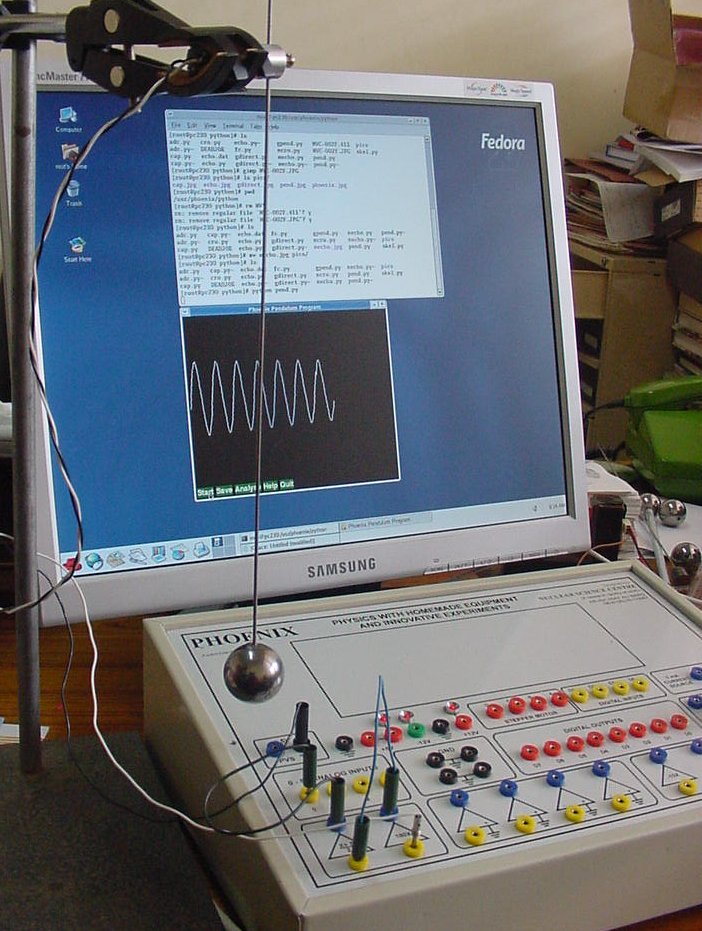
Since we did not have it we tried to the voltage induced on the
terminals of a DC motor when the axis is rotated manually. Some of
the motors available in the market has electronic circuits built into
it and they are not suitable for our purpose. The experimental
setup
and output are shown in the figure.
The amplitude of the signal is in millivolts only. It is
amplified and given to the Digitizer input through the offset
amplifier. We
got a periodic wave form on the screen when the pendulum connected to
the motor axis is set in motion. The period of oscillation can be
easily obtained by
measuring the distance between the peaks.
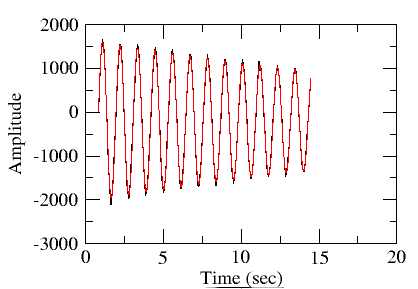
The analysis is done by fitting it with
the following
equation representing a decaying sinusoidal wave.
V = A * sin (w * t + theta)
* exp ( -d * t) + C
The parameters obtained are
A = 4059 - Amplitude term
w
= 5.538 - Angular velocity term
theta= -22.1 - phase offset term
d = 0.00328 - Damping term
C = 3.75 - amplitude offset term
The terms theta and C are
purely from the experimental setup. If the waveform digitization
starts precisely at zero degree theta will vanish and C is the DC
offset of the voltage amplifier used. The parameter 'w'
gives the angular velocity, and period of oscillation T = 2 * Pi /
5.538 = 1.134 seconds. The length of the pendulum is 32 cm and the
value of 'g' calculated from the expression
g
= 4 * Pi2 * L / T2 is 981.5 cm
/sec2.
Discussion
We used a coil moving inside a magnetic field as the
sensor, an old DC motor from a toy car. The voltage produced by a
coil rotating inside a magnetic field produces a sine wave. It is a
sine wave because the projection of the area of the coil along the
magnetic field varies sinusoidally when rotated with a constant speed
according to the elementary text books on electricity and
magnetism.
Here we are not rotating the coil with a constant
speed. The speed changes with angle and we get the peak voltage when
the pendulum is vertical, where the angular velocity is maximum. When
it moves away from the mean position the voltage should reduce due to
two reasons, the change in angular position of the coil (so we
thought) and the velocity of the coil . We did not expect a
sinusoidal output. In the case of rotation the voltage goes to zero
at 90 degree, when the coil is parallel to the field. In case of the
pendulum the voltage will go to zero when the pendulum reaches the
extreme, may be 20 or 30 degrees from the mean position.
The data shows that the voltage depends only on the
velocity. Opening the motor we found that it has multiple poles and
there is an axial magnetic field component. The data shows that the
voltage induced does not depend on the angular position. Results of
fitting with cos2 also
suggested the same. This needs further exploration by assembling a
simple coil in a magnetic field.
Another point is that the sensor does not give the
displacement but the time derivative of it. We have used it as if it
is the angular displacement and it works because of the sinusoidal
nature of the variation. To get angle at any time we need to
integrate the values obtained and the constant of integration can be
obtained by using a light sensor to mark the time at some known
angle. Another method is to attach the pendulum to the axis of a
potentiometer and measure the change of resistance. This will
directly give the angle information.
The above example illustrates the process of learning
physics by explaining experimental data. The insight gained into the
subject is beyond what you get by doing the same experiment with a
stopwatch. The data analysis techniques required for performing
modern experiments also can be taught very effectively.
Related
Experiments
Coupled Pendulum
Driven Pendulum (resonance phenomena)
{kind=link}
{kind=link}
{kind=link}